Bài viết liên quan
Chưa có bài viết nào trong mục này
Hôm nay B2bmart tiếp tục giới thiệu đến các bạn đọc về tính toán momen xoắn và tốc độ xilanh điện (phần 2)
Khi chiều dài của vít Bước vít tăng lên, các hạn chế về cơ học khiến nó không thể đạt được tốc độ của vít ngắn hơn. Dao động điều hòa ở tốc độ quay nhất định thể hiện rõ ràng trong tất cả các hệ thống truyền động bằng trục vít. Hoạt động ở hoặc cao hơn “tốc độ tới hạn” này sẽ làm cho vít bị ” lắc”, do đó sẽ làm hỏng vít. Các biểu đồ sau đây cho thấy những hạn chế về tốc độ của Xi lanh điện dòng ET do chiều dài.
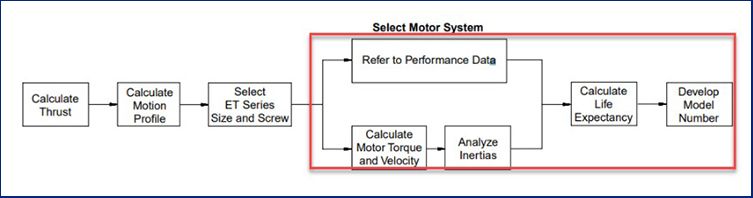
Sử dụng Biểu đồ tốc độ quan trọng để xác định bước vít nào sẽ phù hợp với yêu cầu vận tốc đối với kích thước bộ truyền động đã chọn. Nó có thể cần thiết để tăng kích thước bộ truyền động để đáp ứng tốc độ tới hạn. Hãy nhớ rằng Bước vít sẽ ảnh hưởng đến các yêu cầu về mô-men xoắn, quán tính và tốc độ cho động cơ.
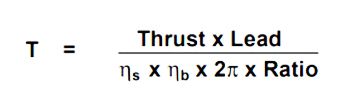
Trong đó:
Với động cơ servo, điều quan trọng là phải hiểu mối quan hệ giữa mô-men xoắn cực đại và mômen quay liên tục. Mô-men xoắn liên tục hoặc rms đề cập đến mô-men xoắn của hệ thống động cơ servo có thể sản xuất liên tục hoặc ở chu kỳ nhiệm vụ 100%.
Mô-men xoắn cực đại đề cập đến mô-men xoắn được tạo ra trong số lượng thời gian không liên tục, thường ít hơn 5 giây. Điều này cho phép người dùng có kích thước tốt hơn động cơ servo được yêu cầu dựa trên nhu cầu của mô-men xoắn thực tế cho ứng dụng.
Các mô-men xoắn cực đại được tính toán trong phần trước sẽ đại diện cho yêu cầu mô-men xoắn cực đại. Để xác định yêu cầu mô-men xoắn liên tục, trước tiên hãy thiết lập một trình tự sử dụng qua một chu kỳ nhiệm vụ nhất định.
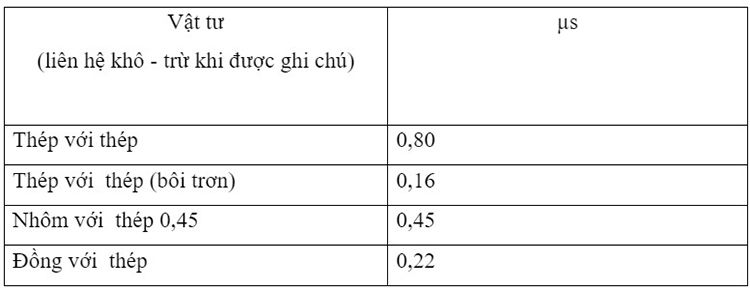
Cần phải tính toán momen xoắn cần thiết ở các trường hợp lực đẩy khác nhau. Có ba các loại mô-men xoắn chung, và chúng tương ứng với lực đẩy được tính trước đó:
Trms = [Σ Ti2ti / Σ ti]
Trong đó:
Điều này sẽ đại diện cho một chu kỳ nhiệm vụ duy nhất.
Trms = [((1000 Nm) 2x 1 giây) + ((25 Nm) 2x 1 giây) + ((975 Nm) 2x 1 giây) + (0 Nm) 2×10 giây)] /[1 + 1 + 1 + 10 giây]
=> Trms = 387,42 Nm
Khi xem đường cong tốc độ-mô-men xoắn của động cơ servo, hãy để Trms biểu thị giá trị mô-men xoắn liên tục tối đa, trong khi Tmax có thể biểu diễn giá trị momen cực đại. Động cơ bước chạy liên tục với mô-men xoắn cực đại và do đó chỉ yêu cầu mức tối đa giá trị mô-men xoắn để định kích cỡ và lựa chọn
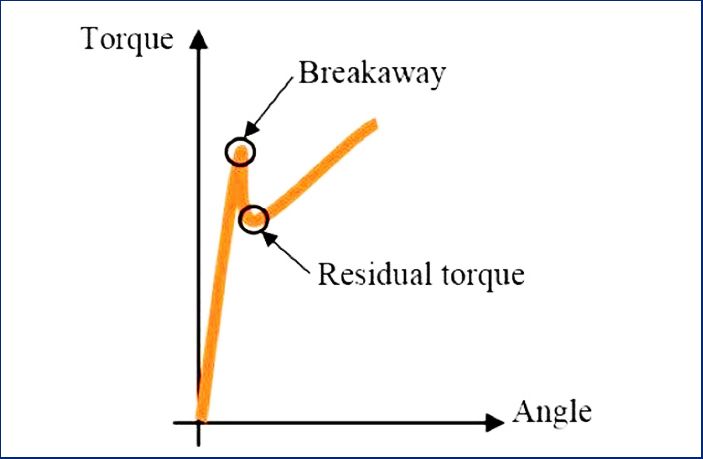
Các biểu đồ sau đây đại diện cho các mômen phá hủy cho từng kích thước cấu hình bộ truyền động và lựa chọn vít. Thông tin này cần được xem xét khi lựa chọn một động cơ thích hợp để dẫn động cơ cấu chấp hành và tải. Mômen ly khai sẽ tính thành mômen cực đại ban đầu cần thiết để gia tốc khối lượng từ trạng thái nghỉ.
Trước khi mỗi bộ truyền động rời khỏi Tự động hóa Bộ phận truyền động, nó được thử nghiệm cho các mômen ly khai và chạy. Báo cáo đã tạo được gửi cùng với việc bảo trì hướng dẫn sử dụng và các thủ tục giấy tờ khác đi kèm với thiết bị truyền động. Điều này cho phép khách hàng xem các chi tiết cụ thể của tùy chỉnh thiết bị truyền động
Đầu tiên, hãy tìm số bước cần thiết để tạo ra mô-men xoắn ly khai.
X =Tbsin (Mres / Dres) × Ts
Trong đó:
Sau đó tính toán độ phân giải:
Độ phân giải = (độ phân giải trục vít / ổ đĩa) × X
Tốc độ = VL × Tỷ lệ/ chì
Trong đó:
Trên đây là cách tính toán momen xoán tốc độ xilanh điện mà B2bmart.vn tổng hợp. Hy vọng những chia sẻ trên sẽ thật hữu ích với các anh em trong nghề.

Chưa có bài viết nào trong mục này