Bài viết liên quan
Fieldbuѕ So Với Giao Thức Internet
Một PLC lấy mẫu đầu vào và kết hợp với các trạng thái nội bộ để chụp nhanh một bức ảnh được gọi là “hình ảnh quá trình”. Ảnh chụp nhanh này được sử dụng để tính toán và quyết định. Nó dẫn đến việc đổi mới trạng thái đồng thời của tất cả các đầu ra. Tín hiệu đầu vào và đầu ra thường là tín hiệu kỹ thuật số 24V hoặc tín hiệu tương tự như điện áp 0 đến 10V hoặc là vòng lặp dòng điện 4 đến 20mA.
Nhưng nếu bạn có hàng trăm đầu vào cảm biến, bạn sẽ không thể kết nối tất cả chúng bằng các dây cáp riêng lẻ. Giải pháp là “Bus” chỉ với một vài dây nối. Nó vận chuyển thông tin giữa PLC và nhiều cảm biến và bộ truyền động một cách tuần tự. Cảm biến và bộ truyền động cần phải “thông minh” hơn: Chúng cần có một bộ xử lý giao tiếp tích hợp để trao đổi các giá trị của chúng với bộ điều khiển.
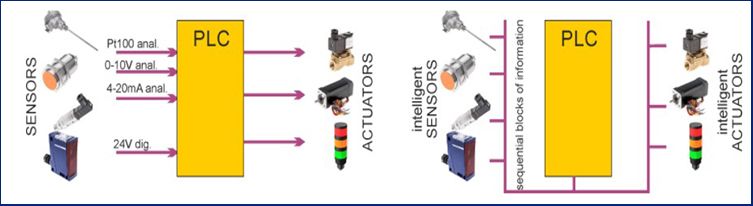
Hệ thống dây thông thường (bên trái) so với hệ thống dây Fieldbus(bên phải).
Cái được gọi là “bus trường” hoặc “bus công nghiệp” cần vận chuyển thông tin theo cách dự đoán. Dự đoán trong giao tiếp có nghĩa là bạn cần biết chính xác thời gian phản ứng tối đa giữa một câu hỏi và câu trả lời cho câu hỏi này.
Bất kể thời gian phản ứng này là bao nhiêu, bất kỳ độ lệch nào của giá trị định mức cũng đều được gọi là “chập chờn” và làm cho hệ thống ít dự đoán hơn. Một giá trị chập chờn là đặc tính quan trọng của hệ thống thời gian thực trong tự động hóa.
Đây là lý do tại sao giảm thời gian phản ứng bằng cách sử dụng ngắt không phải là một ý tưởng thông minh: Bất kỳ sự gián đoạn nào cũng tạo ra một yếu tố xác suất và toàn bộ hệ thống sẽ mất đi đặc tính xác định của nó. Không có gì ngạc nhiên, bus trường thường hoạt động theo chu kỳ và xác định, giống như bộ điều khiển (PLC) mà chúng được kết nối.
Một hệ thống làm việc theo chu kỳ cung cấp một rung động xác định. Bạn có thể tưởng tượng rằng việc kết hợp một số hệ thống tuần hoàn không đồng bộ (như PLC và bus trường) sẽ tổng hợp các chập chờn của chúng. Đồng bộ hóa chu kỳ bus với chu kỳ PLC là một cách dễ dàng để giải quyết vấn đề này.
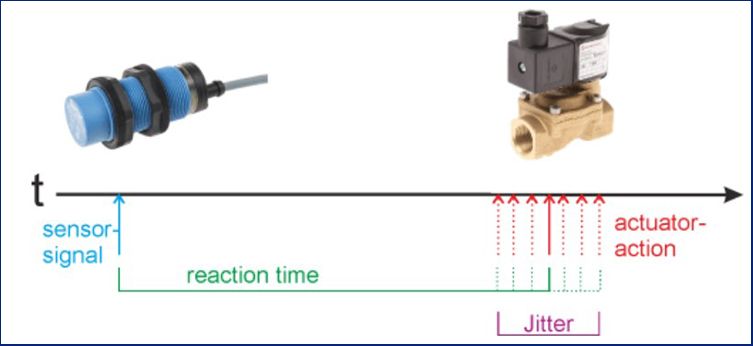
Thời gian phản ứng và rung giật trong tự động hóa.
“Giao thức” là các thỏa thuận giữa các đối tác giao tiếp, xác định các giai đoạn và hành vi trong quá trình giao tiếp. Một vấn đề lớn là sự đa dạng ngày càng tăng trong lịch sử của các giao thức trong tự động hóa. Máy móc thường giao tiếp bằng các “ngôn ngữ” khác nhau, và có cả một ngành tham gia vào việc dịch các ngôn ngữ này.
Chúng ta hãy xem xét kỹ hơn một trong các bus trường cổ điển, được định nghĩa trong tiêu chuẩn IEC 61784/EN 50170: “Xử lý FieldBus cho các thiết bị ngoại vi phân cấp”. Nó sử dụng tín hiệu kỹ thuật số vi sai trên hai dây, dựa trên tiêu chuẩn RS485, nhưng với tốc độ bit rất cao (lên đến 12 Mbit/s). Bộ điều khiển (PLC) là chính và IO ngoại vi là thiết bị phụ chỉ được phép phản hồi các yêu cầu đến theo chu kỳ từ bộ chính.
Trong thời gian cấu hình, kỹ sư cần cho bộ điều khiển biết có bao nhiêu IO và loại IO nào được kết nối. Sau một trình tự khởi động mọi thiết bị phụ phải tham gia vào mạng, PLC sẽ thăm dò theo chu kỳ tất cả IO với một tỷ lệ thăm dò xác định. Các IO ngoại vi sẽ nhận dữ liệu của chúng và trả lời ngay lập tức với các trạng thái IO của chúng.
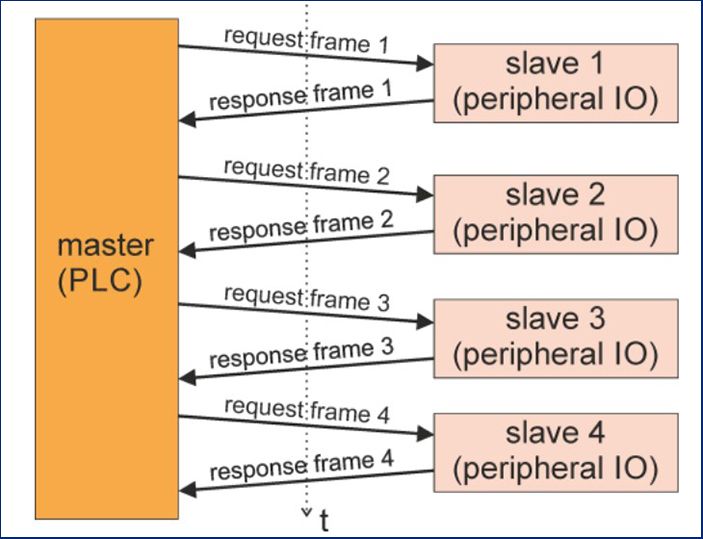
Trao đổi dữ liệu theo chu kỳ trên Profibus
Giao tiếp vòng mã thông báo để cho phép nhiều bản chính trên Profibus (chỉ bản chính có mã thông báo mới được phép thăm dò và khi nó đã hoàn thành chu kỳ của nó thì nó sẽ vượt qua qua mã thông báo cho thiết bị chính tiếp theo). Có rất nhiều tính năng an toàn được tích hợp sẵn.
Ví dụ: nếu IO ngoại vi không được thăm dò ý kiến trong thời gian xác định trước, nó sẽ thay đổi đầu ra của mình thành “trạng thái an toàn” được xác định trước. Nếu một IO ngoại vi phát hiện ra sự cố, nó có thể đặt bit cảnh báo trong phản hồi của mình cho PLC, đổi lại cho phép máy chủ yêu cầu dữ liệu chẩn đoán với cuộc thăm dò tiếp theo của nó.
Tốc độ bit của bus sẽ giới hạn tốc độ thăm dò cũng như trong trường hợp có lỗi truyền dẫn, có thể có các chu kỳ thăm dò không phản ánh trạng thái IO thực tế. Nhưng cuối cùng, kiểu giao tiếp này đặc biệt đáng tin cậy và có tính xác định. Profibus được giới thiệu vào những năm 90 và với hơn 40 triệu thiết bị được chứng nhận, nó vẫn là một trong những giao thức truyền thông được sử dụng nhiều nhất trong ngành công nghiệp tự động hóa. Độ tin cậy của nó làm cho nó trở nên hoàn hảo cho công nghệ an toàn.
Khi một chương trình ứng dụng giao tiếp với cơ sở dữ liệu và cả hai đều chạy trên phần cứng khác nhau, thường có kiến trúc máy chủ-máy khách. Một máy chủ duy nhất cần xử lý dữ liệu cho nhiều máy khách. Nhiều máy khách phải có khả năng bắt đầu giao tiếp – họ là những người chủ giao tiếp – và máy chủ trung tâm phản ứng hệ thống đối với họ.
Sử dụng một cuộc đối thoại được kích hoạt bằng thông điệp sẽ cảm thấy tự nhiên hơn. Nhưng vì thông lượng dữ liệu tổng thể mang tính thống kê cực cao, các mạng xác suất như Ethernet đã giành được ưu thế. Các mạng như vậy cho phép người tham gia, có thể bắt đầu giao tiếp bất cứ lúc nào họ cần gửi tin nhắn. Sự tự do này dẫn đến “va chạm” có thể xảy ra khi hai máy khách khởi động đồng thời. Nhưng nếu phát hiện va chạm nhanh, bạn vẫn có được thông lượng tuyệt vời.
Mạng CNTT và các giao thức của chúng không chỉ có thể truyền Gigabit mỗi giây thay vì Megabit như Profibus mà cấu trúc liên kết của chúng cũng linh hoạt. Về mặt kỹ thuật, không có vấn đề gì khi mở rộng một mạng lưới như vậy trên toàn thế giới, chẳng hạn như Internet. Chìa khóa cho sự linh hoạt này là sự trừu tượng hóa giao thức thành các “lớp” để xây dựng một “ngăn xếp”.
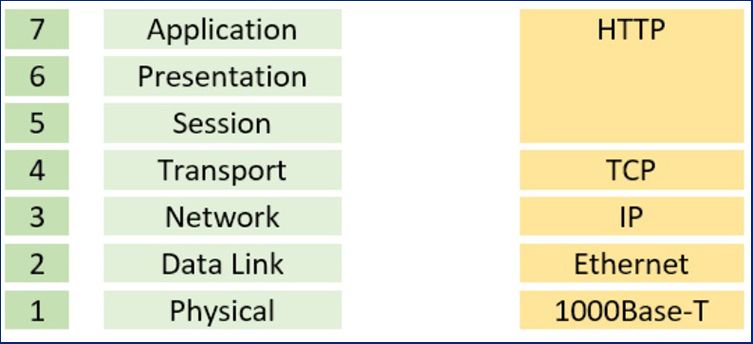
Các lớp giao thức OSI; HTTP
Tính linh hoạt của kiến trúc giao tiếp như vậy là kết quả thực tế, hai đối tác có thể giao tiếp bằng cách sử dụng cùng một lớp nhưng không cần biết bất cứ điều gì về các quy trình giao tiếp ở các lớp thấp hơn. Sẽ nhận được tin nhắn từ lớp thấp hơn tiếp theo giống như giao tiếp trực tiếp với đối tác mạng của mình ở cùng lớp.
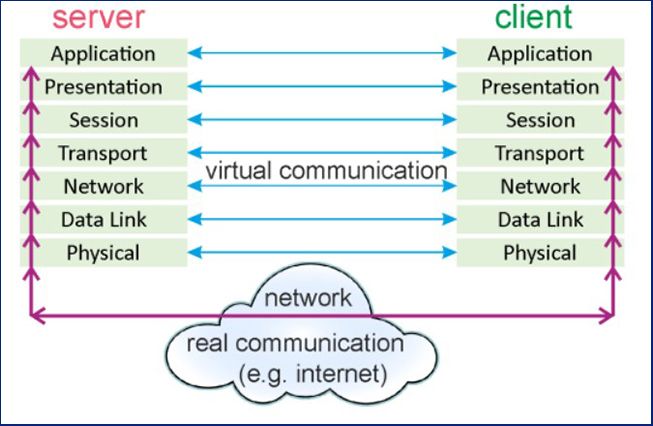
Giao tiếp từng lớp bằng cách sử dụng ngăn xếp giao thức.
Sử dụng lớp mạng cung cấp khả năng định tuyến chuyển mạch: Mỗi nút mạng có thể đưa ra quyết định riêng đến nút đối tác mà nó sẽ chuyển tiếp gói thông tin để đưa nó đến địa chỉ nhận mong muốn (IP). Đây là cơ sở của internet, và nó chỉ đơn thuần có nghĩa là bạn không bao giờ biết được các gói thông tin sẽ đi từ IP người gửi đến IP người nhận theo cách nào.
Bạn không còn dự đoán hoặc xác định chính xác thời gian phản hồi tối đa của đối tác giao tiếp của mình. Nếu bạn sử dụng mạng dựa trên TCP/IP để giao tiếp sự thay đổi trạng thái của công tắc, có thể mất vài micro giây hoặc hàng chục mili giây để bộ điều khiển nhận được thông báo. “TSN” mạng nhạy cảm với thời gian sẽ giải quyết vấn đề này và chúng nhằm mục đích thiết lập khả năng thời gian thực trong các giao thức mạng CNTT.
Tin tốt là chúng ta không cần xác định thời gian thực cho IIoT. Độ trễ không phải là tiêu chí chính. Nhưng có một hạn chế cụ thể khi đưa một máy công nghiệp vào internet: Đối với các ngăn xếp giao thức truyền thông hướng sự kiện, luôn cần hệ điều hành phân luồng hoặc đa tác vụ. Các PLC cổ điển thường không có hệ điều hành như vậy.
Cái gọi là “PLC mềm” hiện đại là các ứng dụng chạy trên IPC dựa trên Linux (“PC công nghiệp” – máy tính thường được gắn trên DIN-ray và không sử dụng bàn phím, chuột và màn hình). Mặc dù các hệ thống như vậy có thể quản lý ngăn xếp giao thức TCP/IP một cách hiệu quả, nhưng điều khôn ngoan là nên tách biệt giao tiếp IIoT dựa trên tin nhắn khỏi phần mềm điều khiển.
Cổng vào là một phương tiện hoàn hảo để tách mạng và phần mềm. Một cổng có thể hoạt động giống như bất kỳ IO ngoại vi nào với PLC và kết nối với internet dựa trên tin nhắn ở phía bên kia.
B2bmart.vn vừa giới thiệu đến bạn đọc một số thông tin về Fieldbuѕ so với giao thức Internet. Hi vọng qua bài đọc trên sẽ giúp bạn hiểu rõ hơn và có thể áp dụng chúng vào công việc của mình.

B2b Team